Solve your packing bottleneck
We build compact, flexible end of line solutions for food producers who need simple, reliable automation without complexity.

We build compact, flexible end of line solutions for food producers who need simple, reliable automation without complexity.
Your production is fast and efficient. But the end of the line? That's where things often slow down. Manual packing is repetitive work. Your best people could be doing something more important.
We build our machines to be the boring, reliable part of your operation. No integration headaches. Just machines that pack your products, stack your boxes on pallets and get them ready to ship.
Our case packers offer predictability to your packing operation. Working continuously and keeping products moving. Being able to pack thousands of products per hour, we make sure that your products are packed before your shift ends.
Discover the case packer >>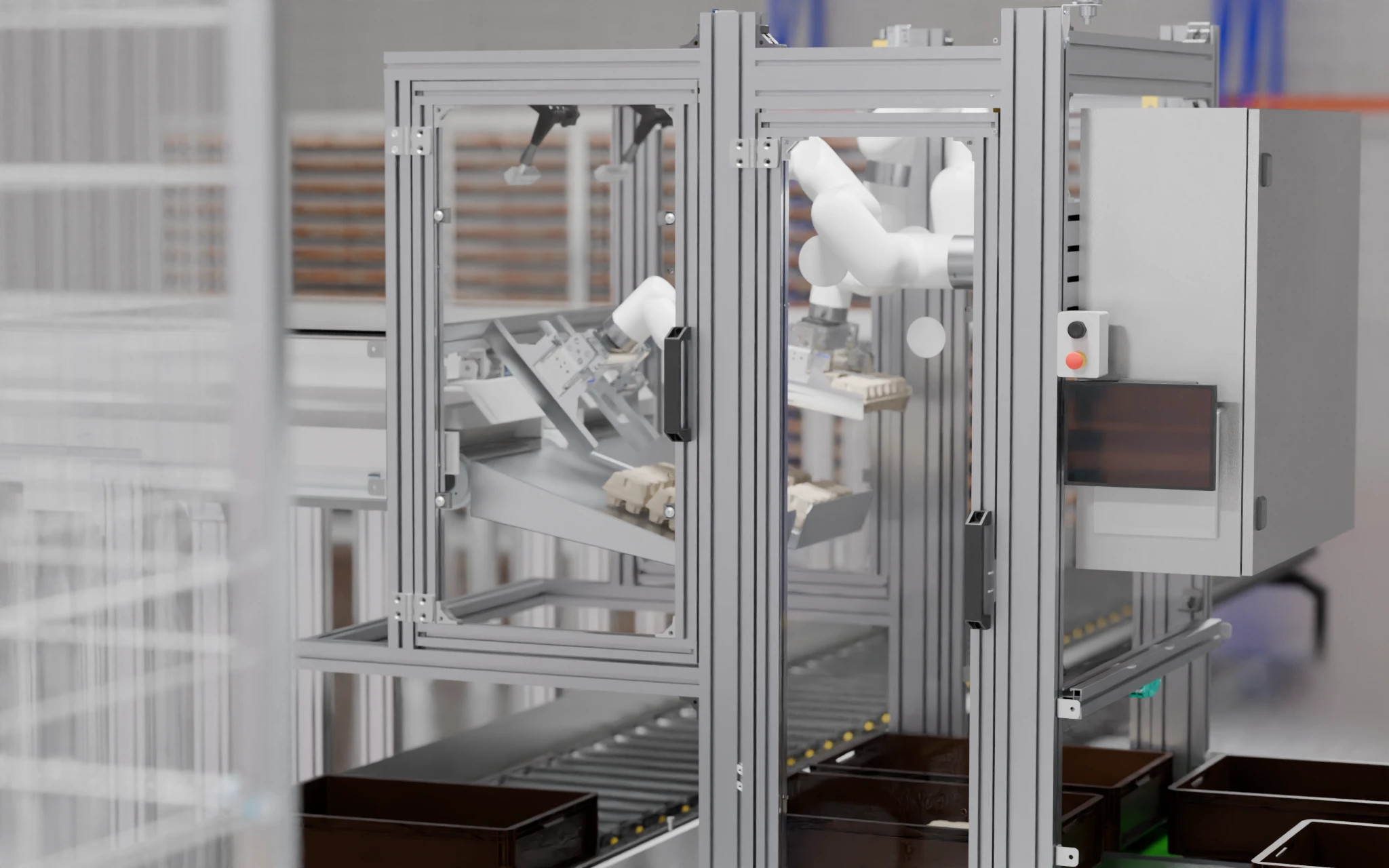
Case packing and palletizing is often the bottleneck of a food production line. All of our customers have been able to increase throughput with our machines.
Try before you buy. We offer flexible rental and trial options before having to commit to a purchase. Come see the machines in action.
Traditional automation means ripping out half your facility and redesigning workflows. Our machines are compact and integrate into existing production lines and are ready to go and operational within a day of delivery.
Read our curated insights, helpful tips and latest stories from the world of case packing.
Let's talk about your setup. We'll walk through your production line, understand your specific products and boxes, and show you exactly what our case packer can do.
Let's talk about your line >>